Summary
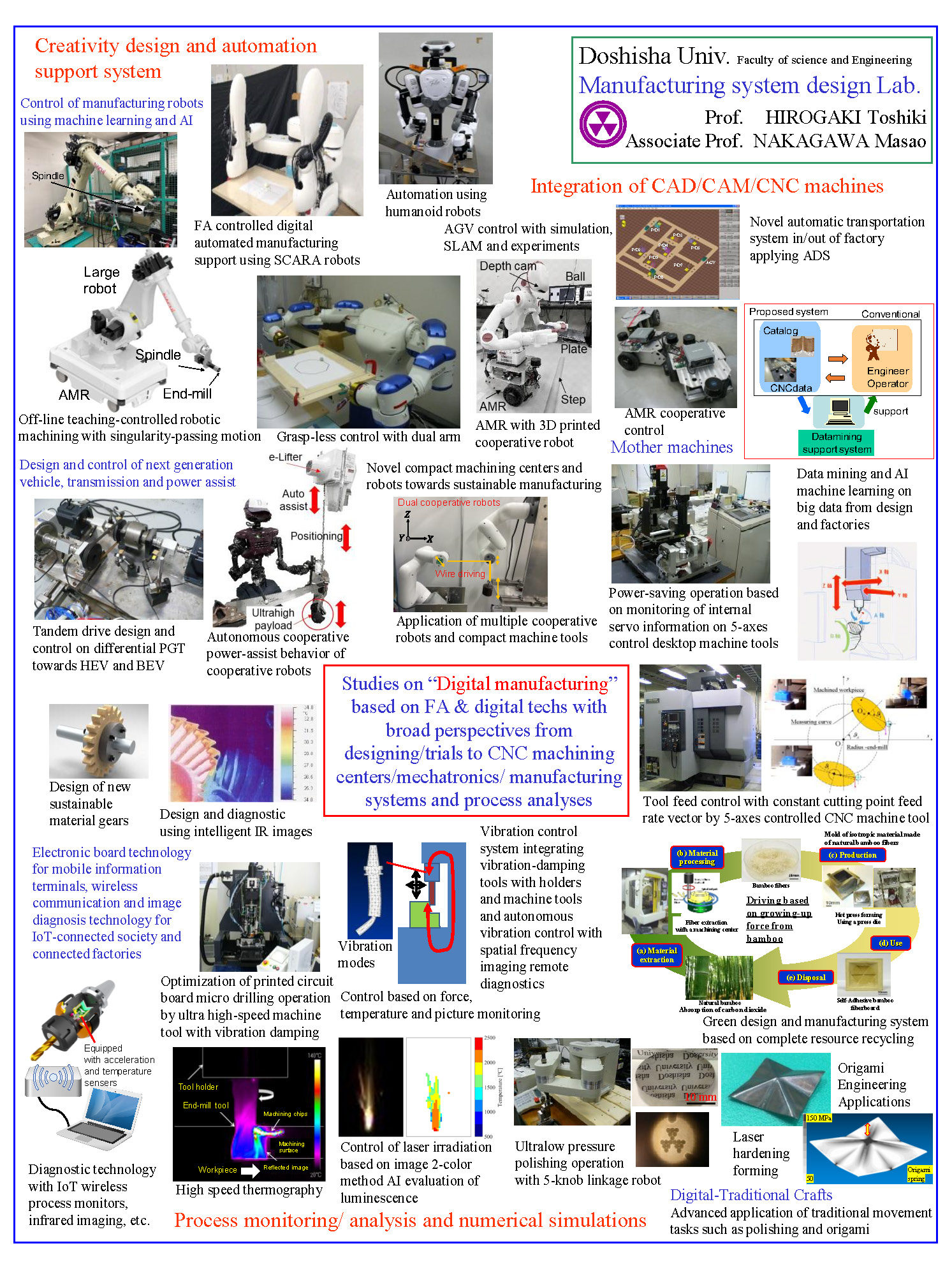
Our laboratory aims to research "digital manufacturing systems" based on mechatronics, automation and digital technology, working from a broad perspective from design design and prototyping to CNC machine tools, industrial robots, automated transport, sustainable production systems and process elucidation. Toward the IoT and information society synchronized with the development of computers, technological innovations such as machine learning and AI (artificial intelligence) are also actively introduced into our systems. We are also engaged in research and development related to technologies for a sustainable society that takes into account the cooperation between humans and machines and the global environmental impact that will be necessary for the next generation of manufacturing (manufacturers). While "the importance of manufacturing is universal," it is believed that "the technology of how to make things is constantly changing. Toward the needs of a changing society, we will promote research and development of autonomous, distributed, and cooperative "making," "manipulating," and "transporting" based on globally applicable mechatronics technology.
Poster
Machine tool related
- Tool approach and shape generation under constant feed-rate vector control at the cutting point in five-axis machining centers (Otsuki)
- Surface pattern control in ball-end milling based on fusion of servo data and wireless tool-holder force monitoring in five-axis machining centers (Yoshimura)
- Cutting mark control using barrel and lens tools based on wireless tool-holder force monitoring and pattern image processing in five-axis machining centers (Kawata)
- State monitoring based on inverse analysis using 2D-DFT images of machined surfaces and chips in end-mill chatter vibration (Crowder)
- Thread generation by thread milling based on wireless tool-holder and servo monitoring, and evaluation of thread functionality (Matsunoshita)
- Motion analysis of a compact five-axis machine tool with harmonic drives during warm-up operation for energy-efficient high-precision performance (Iwashita)
- Investigation of an energy-saving machining method using combined rotary and linear motions in multitasking machine tools with idling stop (Tada)
- State monitoring during end-mill machining for novel low-tooth-count gear generation in a four-axis RoboDrill and analysis of its drive performance (Yang)
- Investigation of high-speed step motion of micro-diameter drills using an ultra-high-speed spindle with a counter-dynamic balance mechanism (Yuuki)
- Helical motion analysis in CFRP hole milling using electroplated barrel end mills based on servo, force, and strain monitoring (Tenoji)
Robot
- Development of end-milling technology using helical interpolation in offline teaching of large industrial robots and its accuracy improvement (Kanzaki)
- Investigation of drilling under wrist singularity conditions in large industrial robots using offline teaching (Tsuboi)
- Stable long-duration motion control for grasp-less ball handling in out-of-plane manipulation by a dual-arm robot (Mishima)
- Grasp-less handling strategies for shaking and agitation tasks using a dual-arm SCARA robot (Yamashita, Wada)
- Motion accuracy analysis of work plate manipulation in grasp-less handling using a dual-arm SCARA robot (Kobayashi, Wada)
- High-payload wire-driven control method based on cooperative operation of two compact collaborative robots with electric balancer assistance (Tsubaki)
- Power-assisted cooperative motion and advanced manipulation of electronic musical instruments using a dual-arm 3D-printed asymmetric humanoid robot (Sho)
- Study on Sound Feedback Motion of Advanced Musical Saw by Dual-Arm Coordination of Humanoid Robot (Liu)
- Advanced musical saw manipulation and power-assist control via dual-arm coordination in humanoid robots (Santa)
- Sound feedback control for advanced denim shaving motion using dual-arm coordination of humanoid robots (Ito)
- Plate manipulation for grasp-less ball handling in factory automation using a humanoid robot under dynamic conditions (Wu)
- Task motion analysis of a 3D-printed humanoid robot during object transport over steps (Oikawa)
- Ultrasonic assisted polishing operation of five-bar planar parallel robot by controlling polishing force (Tong)
Gear
- Drive control during repeated speed shifting based on frequency response in a three-axis differential planetary gear train with tandem drive (Tange)
- Drive control during step shifting in a three-axis differential planetary gear train based on high-speed video monitoring (Oizumi)
- Drive characteristics during repeated speed shifting influenced by gear tooth surface accuracy combinations in a three-axis differential planetary gear train (Ma)
- Elucidation of meshing phenomena in high-ratio hypoid gears with a single-tooth pinion using high-speed infrared thermography (Takeuchi)
- Influence of temperature rise during gear engagement on drive characteristics of high-ratio hypoid gears using infrared thermography and lubricant control (Hirano)
- Machining of small numbers of hypoid pinion teeth with five-axis controlled machine tools and its driving evaluation (Justin)
Bamboo material
- Analysis of meshing behavior of environmentally friendly bamboo fiber bevel and face gears based on vibration and strain monitoring (Murata, Tanaka)
- End-milling control for bamboo fiber extraction and laser-based 3D forming of self-bonded fine bamboo fiber products for sustainable manufacturing systems (Nakayama, Tanaka)
- CAD/CAM technologies based on integrated machine tool control and sensing information (Ghatas, Tanaka)
Data mining
- Discovery of new knowledge in barrel tool catalog data using AI and machine learning-based data mining (Hou)
- Discovery of new knowledge in tapered ball-end mill catalog data using AI and machine learning-based data mining (Ota)
- Discovery of new knowledge in micro-drill catalog data using AI and machine learning-based data mining (Kita)
AMR
- Development of AMR that can adapt to various environments and study on various cooperative work with humans by AMR (Omi)
- Advanced factory task execution through integration of SLAM and ROS2 in AGV/AMR systems under complex environments (Igarashi, Omi)
- Mechanisms and control methods for overcoming large steps in SLAM-based navigation of AGV/AMR systems in indoor factories (Oishi, Omi)
- Development and application of AGV at outdoor (Long, Omi)
Laser processing
- Development of a laser irradiation control system for via-holes based on two-color video imaging and AI monitoring for digital twin applications (Morishita, Fujimoto)
- Application of origami engineering to laser quenching forming for complex plate spring geometries and its performance evaluation (Kuno, Fujimoto)