概要
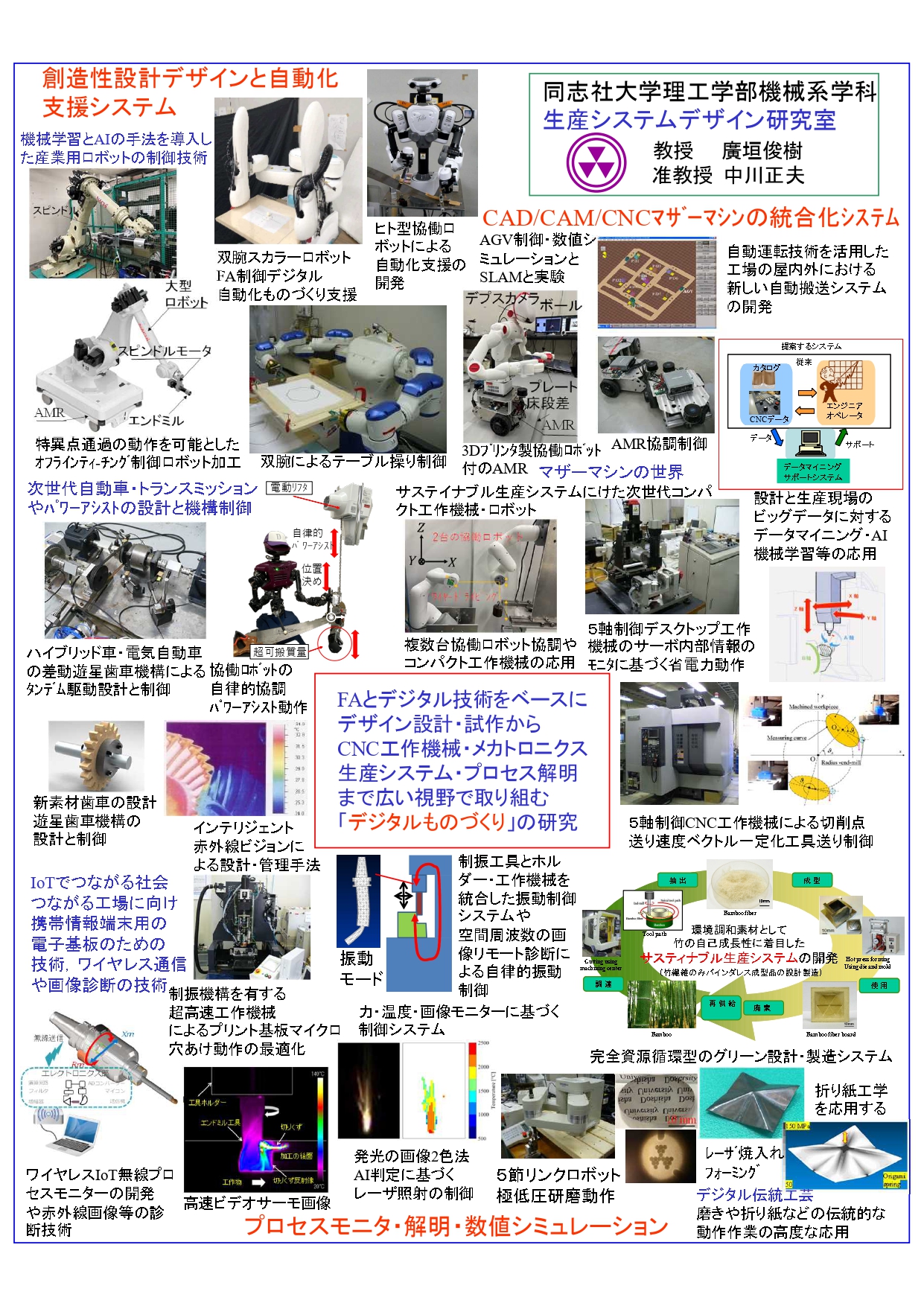
本研究室は、メカトロニクス・自動化とデジタル技術をベースにデザイン設計・試作からCNC工作機械・産業用ロボット・自動搬送・サステイナブル生産システム・プロセス解明まで、広い視野で取り組む「デジタルものづくりシステム」の研究を目指している。コンピュータの発展に同期したIoT・情報化社会に向けて、機械学習・AI(人工知能)などの技術革新も積極的に我々のシステムに導入している。次世代の製造業(メーカ)に必要となる、人と機械の協調、地球環境負荷を考慮したサスティナブル(持続的発展)社会に向けた技術に関連する研究開発にも取り組んでいる。「ものづくりの大切さは普遍的」であるが,「つくり方の技術は常に変化」するものと考えられます.変化する社会のニーズに向け、グローバルに通用するメカトロニクス技術に基づく自律・分散・協調的な「つくる」「あやつる」「はこぶ」の研究開発を進めます。
ポスター
工作機械関連
- 5軸制御工作機械における切削点送り速度ベクトル一定化制御における工具アプローチと各種形状創成の検討(M2 大槻)
- 5軸制御工作機械によるサーボと無線式工具ホルダ力モニタ情報の融合に基づくボールエンドミル切削痕模様制御(M2 𠮷村)
- 5軸制御工作機械によるバレル・レンズ工具切削痕模様制御のための無線式工具ホルダ力モニタと模様画像処理(M1 川田)
- 工作機械のエンドミルびびり振動の加工面模様の二次元離散フーリエ変換画像および切りくずの逆解析状態モニタ(M1 クラウダー)
- 工作機械での無線式工具ホルダーとサーボ情報のモニタリングに基づくスレッドミルネジ創成とそのネジ機能の評価 (M2 松野下)
- ハーモニックドライブ付きコンパクト5軸制御工作機械の暖機運転と省電力・高精度化に向けた動作の解明(M2 岩下)
- アイドリングストップ付きマルチタスク工作機械の旋回と直進運動を組み合わせた新しい省電力加工法の検討(M2 多田)
- 4軸制御工作機械ロボドリルでの新しい少数歯車創成エンドミル加工時の状態モニタとその駆動性能の考察 (D2 楊)
- カウンタ動バランス機構を有する超高速スピンドル搭載工作機械の極小径ドリルの高速ステップ動作の検討(M2 結城)
- 航空機用CFRPの電着バレルエンドミル穴加工時のサーボ情報・力・ひずみモニターに基づくヘリカル運動の検討(M1 天王寺)
ロボット
- 大型産業ロボットのオフラインティーチングでのヘリカル補間による運動エンドミル加工技術の開発とその精度向上(M2 神﨑)
- 大型産業ロボットのオフラインティーチングでの特異点通過のドリル加工技術の開発とその精度向上(M1 坪井)
- 双腕ロボットの作業プレート面外操り動作でのボールのグラスプレスハンドリングの初期から長時間の安定運動制御法(M1 三島)
- 双腕スカラーロボットの作業プレート面内操り動作での振とう攪拌のグラスプレスハンドリングの検討(M2 山下,D1 和田)
- 双腕スカラーロボットの作業プレート面内操り動作でのボールのグラスプレスハンドリングの運動精度の検討(M1 小林,D1 和田)
- 2台のコンパクト協働ロボットと電動バランサーアシスト協働動作に基づく超可搬で高度なワイヤードライビング制御法(M2 椿)
- 3Dプリンタ製左右非対称ヒューマノイドロボットの双腕協調による高度な電子楽器の操りと協調動作の検討(M1 庄)
- ヒューマノイドロボットの双腕協調による高度なミュージカルソーのサウンドフィードバック動作の検討(M2 刘)
- ヒューマノイドロボットの双腕と電動バランサーアシスト協調による超可搬で高度なミュージカルソーの操り動作検討(M2 三田)
- ヒューマノイドロボットの双腕協調による高度なデニムシェービング動作のサウンドフィードバック制御の検討(M1 伊藤)
- Plate manipulation for grasp-less ball handling in factory automation using a humanoid robot under dynamic conditions(D2 WU(武))
- 3Dプリンタ製ヒューマノイドロボット搭載AMR(自動搬送車)の段差乗り越えを含む搬送中の作業動作の検討(M2 及川)
- Ultrasonic assisted polishing operation of five-bar planar parallel robot by controlling polishing force(D1 Tong)
歯車
- 3軸差動遊星歯車機構タンデム駆動の軸受け剛性違いが周波数応答繰り返し変速中の駆動特性に与える影響の検討(M2 丹下)
- 3軸差動遊星歯車機構タンデム駆動のステップ変速中の複数遊星歯車の高速度ビデオモニタに基づく駆動制御法の検討(M1 大泉)
- 3軸差動遊星歯車機構タンデム駆動の遊星歯車の歯面精度の組み合わせが変速中の振動騒音に与える影響の考察(M1 馬)
- 高速ビデオ型赤外線サーモグラフィモニタの連写画像合成に基づく1枚歯ピニオンハイポイドギアかみあい現象の解明(M2 竹内)
- 高速ビデオ型赤外線サーモグラフィモニタによるハイレシオハイポイドギアの駆動開始時や実かみあい率からの駆動特性の考察(M1 平野)
- Machining of small numbers of hypoid pinion teeth with five-axis controlled machine tools and its driving evaluation(M1 Justin)
竹素材
- 環境にやさしい竹繊維ベベルギヤ.フェースギヤの歯の振動・歯元ひずみモニタによるかみあい解析と設計への応用(M2 村田,D3 田中)
- サスティナブル生産システムに向けたファイン竹繊維自己接着製品のための竹繊維抽出エンドミル制御法とレーザ3D成型検討(M1 中山,D3 田中)
- CAD/CAM technologies based on integrated machine tool control and sensing information(M1 Ghatas,D3 田中)
データマイニング
- データマイニングにAI機械学習の手法を導入したバレル工具カタログ情報における新知識の発見(M2 方)
- データマイニングにAI機械学習の手法を導入したテーパボールエンドミル工具カタログ情報における新知識の発見(M1 太田)
- データマイニングにAI機械学習の手法を導入したマイクロドリルカタログ情報における新知識の発見(M1 喜多)
AMR
- 環境にロバストなAMRの開発と人間との多様な協働作業に関する検討(D2 大見)
- 自動搬送車(AGV・AMR)の複雑環境下でのSLAMとROS2ロボットの融合による高度な工場作業の検討(M1 五十嵐,D2 大見)
- 自動搬送車(AGV・AMR)の室内工場でのSLAM下での大きな段差乗り越え機構と制御法の検討(M2 大石,D2 大見)
- Development and application of AMR at outdoor(D1 Long)
レーザー加工
- デジタルツインに向けた2色法ビデオ画像AIモニタに基づくバイアホールのレーザ照射制御システムの構築(M2 森下,D3 藤本)
- 折り紙工学に基づく小出力半導体レーザ焼入れフォーミングによる複雑板バネ形状の創成法の開発とその性能評価(M1 久野,D3 藤本)